- An Introduction to Self-Driving Car
- Machine Learning Algorithms and Techniques in Self-Driving Cars
- Localization for Self-Driving Cars
- Perception for Self-Driving Cars
- Hardware and Software Architecture of Self-Driving Cars
- Sensor Fusion for Self-Driving Car
- Self-Driving Car Path Prediction and Routing
- Self-Driving Car Decision-Making and Control System
- Cloud Platform for Self-Driving Cars
- Dynamic Modeling of Self-Driving Car
- Safety of Self-Driving Cars
- Testing Methods for Self-Driving System
- Operating Systems of Self-Driving Cars
- Training a YOLOv8 Model for Traffic Light Detection
- Deployment of Self-Driving Cars
Localization for Self-Driving Cars | Self Driving Cars
Localization is one of the most important capabilities for self-driving cars, making it possible to detect their exact location within centimeters inside a map. "Localization" refers to determining the vehicle's exact location on a map. The vehicle can identify its precise connection to all of the items on the map via localization. Most self-driving cars use localization as a way to find their way around. If the car wants to make decisions like passing another vehicle or just find a path, it must first understand what is around it and where it is. This information system is a way to determine the car's trajectory and assist it in making essential decisions.
Calculating the precise location of the vehicle necessitates the use of complex mathematical and probability calculations. Though localization is a tricky task, there are a variety of approaches that may be used to assist a self-driving car in locating itself. Localization techniques of a self-driving car are discussed below,
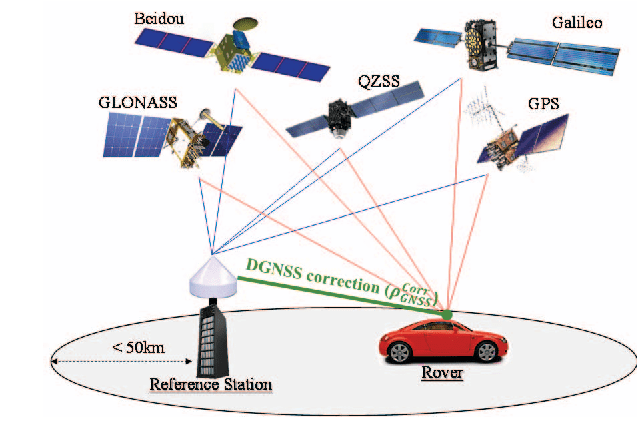
1. Localization by GNSS
The Global Navigation Satellite System (GNSS) is a network of satellites that transmits location and timing data to GNSS receivers through space signals. This information is subsequently used by the receivers to calculate their position. GNSS offers the precision, availability, and dependability that self-driving vehicles demand. GNSS gives accurate results within decimeter-level also, which ensures a vehicle stays in its lane or a safe distance from other vehicles. To offer the location and sensor integration that self-driving cars require, GNSS receivers use various frequencies and several GNSS constellations, Synchronous Position Attitude and Navigation (SPAN) technology, GPS Anti-Jam technology, and interference reduction, and correction services.
2. Localization by Odometry
To estimate a location at a time, odometry employs a starting position and a wheel displacement computation. During the lane-change maneuver, odometrical computations are used to replace the missing camera data. If the wheel speeds are monitored, odometry may estimate a vehicle's real position and orientation relative to a specified beginning location. The higher the precision of these measures, the better the outcomes.
3. Localization by Lidar
In the realm of vehicle location and navigation, Lidar is now the most frequently utilized non-contact sensor. The visual navigation based on the camera primarily depends on the camera to gather environmental information, which is then used to achieve vehicle navigation using a number of image processing techniques including feature identification matching. The realization technique is simple, but it is sensitive to ambient illumination and the camera field of view is limited, thus the algorithm needs are greater. LIDAR sensors acquire distance data from the surroundings for laser navigation.

4. Localization by Cameras
Cameras are an important exteroceptive sensor for self-driving cars since they are inexpensive and compact, give visual information about the area, and function in a variety of weather situations. They're useful for a variety of things, including visual navigation and obstacle detection. We can cover the whole 360-degree field of vision surrounding the automobile using a surround multi-camera system. As a result, we avoid blind areas, which may otherwise result in an accident. Lane line p, traffic light, and sign status, and a variety of other items are all produced by cameras. The most important aspect of a camera to know is that it has a 2D sensor. Though there are drawbacks, we may utilize camera images and machine learning techniques to obtain the outcomes we want.

5. Localization by Inertial Navigation Systems (INS)
Because of its great autonomy, concealment, continuity, insusceptibility to temperature, and the sequential delivery of location, velocity, and attitude information, the inertial navigation system (INS) is commonly used for self-driving cars placement and navigation. In the event of a signal failure, INS delivers real-time roll, pitch, and heading through a GNSS receiver like buildings, trees, etc. In a driverless automobile application, the inertial sensor is also utilized to accurately synchronize and steady other equipment like LiDAR and camera.

6. Multi-Sensor Fusion (MSF) based localization
Sensor fusion, also known as data fusion, is an important component of self-driving car design. Algorithms that support sensor fusion approaches, in particular, improve accuracy and are more resistant to sensor failure. To achieve high localization accuracy and durability in demanding settings including metropolitan downtowns, highways, and tunnels, the self-driving system combines data from complementary sensors like GNSS, LiDAR, and cameras. Using the best of each sensor, it intends to deliver precise location services for self-driving cars in a variety of circumstances.
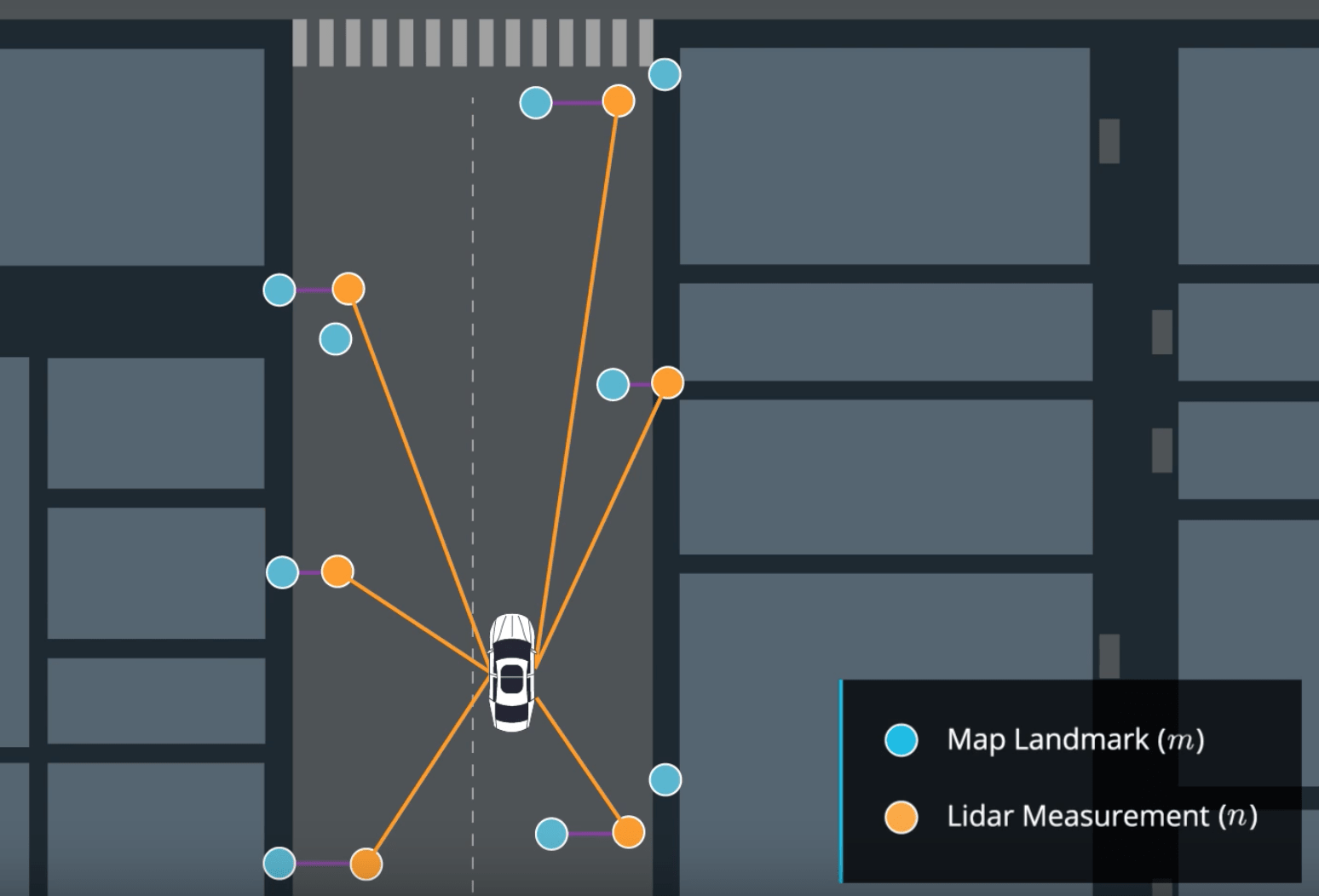
7. Simultaneous Localization And Mapping (SLAM)
Another most common approach of self-driving car localization is SLAM, which allows us to estimate the map landmark coordinates as well as vehicle's coordinates. For this, the Lidar is used to locate walls and sidewalks and then it creates a map. The algorithms in SLAM must be able to detect landmarks, position them, and add them to the map. SLAM is a technique for modeling states in time, which is frequently used in autonomous navigation. It is largely dependent on probability concepts, with conclusions based on posterior and prior probability distributions of states and measurements, as well as their connection. The primary challenge with this method is its computational complexity. The more measurements and dimensions there are in a state, the more difficult the computations become, resulting in a trade-off between precision and complexity.
Conclusion
Localization is an essential topic for self-driving cars. We can drive autonomously if we can locate our car extremely precisely. This field is continuously changing; sensors are becoming more precise, and algorithms are becoming more efficient. We can now create algorithms for designing trajectories and making decisions for our self-driving automobiles.
Thank you for reading the article. Hope it helped to give you a brief idea about localization methods of the self-driving car. If you have any queries or suggestions regarding the article, you can feel free to comment below. Your comments are always important to us.